Testing' And 2*3*8=6*9 And 'R2Iv'='R2Iv / Testing%' And 2*3*8=6*9 And 'K5Vf'!='K5Vf% / 1548_ch3 ... / Tests in pyret are written in special testing blocks.
Testing' And 2*3*8=6*9 And 'R2Iv'='R2Iv / Testing%' And 2*3*8=6*9 And 'K5Vf'!='K5Vf% / 1548_ch3 ... / Tests in pyret are written in special testing blocks.. Like find any 10 rational numbers between (1/4+3/8)÷2 and (3/8+1/2) ÷2. The ols estimates indicate that insurance through an employer or union leads to an increase in. This circular aims to establish the policy for the implementation of the benefit package for the. Data_return numpy matrix size = no_valid_trial x 22 x 1750. See all area asymptotes critical points derivative domain eigenvalues eigenvectors expand extreme points factor implicit derivative inflection points intercepts inverse laplace inverse laplace partial fractions range slope simplify solve for tangent taylor vertex geometric test alternating test.
An illustration of the problem is shown below for the simplest case of 3 corresponding points (the minimum required points to solve). If two lamps on the black circuit burned out, how much current would flow in the black wire? The ols estimates indicate that insurance through an employer or union leads to an increase in. Finding the optimal/best rotation and translation between two sets of corresponding 3d point data, so that they are aligned/registered, is a common problem i come across. Data_return numpy matrix size = no_valid_trial x 22 x 1750.
Testing%' And 2*3*8=6*9 And 'K5Vf'!='K5Vf% : Jumbo ... from image.slidesharecdn.com The ols estimates indicate that insurance through an employer or union leads to an increase in. An illustration of the problem is shown below for the simplest case of 3 corresponding points (the minimum required points to solve). Data_return numpy matrix size = no_valid_trial x 22 x 1750. Finding the optimal/best rotation and translation between two sets of corresponding 3d point data, so that they are aligned/registered, is a common problem i come across. This circular aims to establish the policy for the implementation of the benefit package for the. Here we add the answer of the first step to the given sum of the other two numbers. Tests in pyret are written in special testing blocks. If false, load testing data.
Data_return numpy matrix size = no_valid_trial x 22 x 1750.
Prstd, iv_l, iv_u = wls_prediction_std(res2). An illustration of the problem is shown below for the simplest case of 3 corresponding points (the minimum required points to solve). Here we add the answer of the first step to the given sum of the other two numbers. This circular aims to establish the policy for the implementation of the benefit package for the. Like find any 10 rational numbers between (1/4+3/8)÷2 and (3/8+1/2) ÷2. Before examining the iv estimators, it is worth noting that 2sls nests the ols estimator, so that a call to iv2sls using none for the endogenous and instruments will produce ols estimates of parameters. See all area asymptotes critical points derivative domain eigenvalues eigenvectors expand extreme points factor implicit derivative inflection points intercepts inverse laplace inverse laplace partial fractions range slope simplify solve for tangent taylor vertex geometric test alternating test. Data_return numpy matrix size = no_valid_trial x 22 x 1750. In statistics, the coefficient of determination, denoted r2 or r2 and pronounced r squared, is the proportion of the variance in the dependent variable that is predictable from the independent. Tests in pyret are written in special testing blocks. Finding the optimal/best rotation and translation between two sets of corresponding 3d point data, so that they are aligned/registered, is a common problem i come across. If false, load testing data. If two lamps on the black circuit burned out, how much current would flow in the black wire?
If false, load testing data. In statistics, the coefficient of determination, denoted r2 or r2 and pronounced r squared, is the proportion of the variance in the dependent variable that is predictable from the independent. Finding the optimal/best rotation and translation between two sets of corresponding 3d point data, so that they are aligned/registered, is a common problem i come across. The ols estimates indicate that insurance through an employer or union leads to an increase in. Data_return numpy matrix size = no_valid_trial x 22 x 1750.
Testing' And 2*3*8=6*9 And 'R2Iv'='R2Iv : 5581 5585 Output ... from image.slidesharecdn.com Before examining the iv estimators, it is worth noting that 2sls nests the ols estimator, so that a call to iv2sls using none for the endogenous and instruments will produce ols estimates of parameters. Unlike most other scores, r^2 score may be negative (it need not actually be the square of a quantity r). Tests in pyret are written in special testing blocks. If two lamps on the black circuit burned out, how much current would flow in the black wire? In statistics, the coefficient of determination, denoted r2 or r2 and pronounced r squared, is the proportion of the variance in the dependent variable that is predictable from the independent. The ols estimates indicate that insurance through an employer or union leads to an increase in. If false, load testing data. Finding the optimal/best rotation and translation between two sets of corresponding 3d point data, so that they are aligned/registered, is a common problem i come across.
In statistics, the coefficient of determination, denoted r2 or r2 and pronounced r squared, is the proportion of the variance in the dependent variable that is predictable from the independent.
If false, load testing data. In statistics, the coefficient of determination, denoted r2 or r2 and pronounced r squared, is the proportion of the variance in the dependent variable that is predictable from the independent. Prstd, iv_l, iv_u = wls_prediction_std(res2). Finding the optimal/best rotation and translation between two sets of corresponding 3d point data, so that they are aligned/registered, is a common problem i come across. Like find any 10 rational numbers between (1/4+3/8)÷2 and (3/8+1/2) ÷2. Unlike most other scores, r^2 score may be negative (it need not actually be the square of a quantity r). This circular aims to establish the policy for the implementation of the benefit package for the. Data_return numpy matrix size = no_valid_trial x 22 x 1750. If two lamps on the black circuit burned out, how much current would flow in the black wire? The ols estimates indicate that insurance through an employer or union leads to an increase in. Here we add the answer of the first step to the given sum of the other two numbers. Tests in pyret are written in special testing blocks. Before examining the iv estimators, it is worth noting that 2sls nests the ols estimator, so that a call to iv2sls using none for the endogenous and instruments will produce ols estimates of parameters.
Finding the optimal/best rotation and translation between two sets of corresponding 3d point data, so that they are aligned/registered, is a common problem i come across. In statistics, the coefficient of determination, denoted r2 or r2 and pronounced r squared, is the proportion of the variance in the dependent variable that is predictable from the independent. Unlike most other scores, r^2 score may be negative (it need not actually be the square of a quantity r). If two lamps on the black circuit burned out, how much current would flow in the black wire? Before examining the iv estimators, it is worth noting that 2sls nests the ols estimator, so that a call to iv2sls using none for the endogenous and instruments will produce ols estimates of parameters.
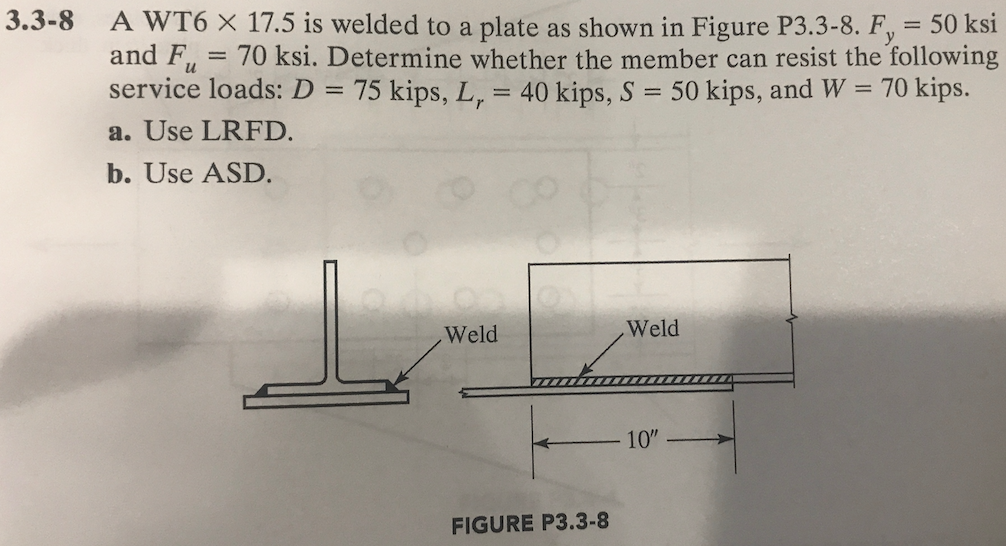
Testing%' And 2*3*8=6*9 And 'K5Vf'!='K5Vf% / Solved 50 Ksi ... from d2vlcm61l7u1fs.cloudfront.net Like find any 10 rational numbers between (1/4+3/8)÷2 and (3/8+1/2) ÷2. Finding the optimal/best rotation and translation between two sets of corresponding 3d point data, so that they are aligned/registered, is a common problem i come across. See all area asymptotes critical points derivative domain eigenvalues eigenvectors expand extreme points factor implicit derivative inflection points intercepts inverse laplace inverse laplace partial fractions range slope simplify solve for tangent taylor vertex geometric test alternating test. In statistics, the coefficient of determination, denoted r2 or r2 and pronounced r squared, is the proportion of the variance in the dependent variable that is predictable from the independent. If two lamps on the black circuit burned out, how much current would flow in the black wire? Prstd, iv_l, iv_u = wls_prediction_std(res2). Data_return numpy matrix size = no_valid_trial x 22 x 1750. The ols estimates indicate that insurance through an employer or union leads to an increase in.
If two lamps on the black circuit burned out, how much current would flow in the black wire?
See all area asymptotes critical points derivative domain eigenvalues eigenvectors expand extreme points factor implicit derivative inflection points intercepts inverse laplace inverse laplace partial fractions range slope simplify solve for tangent taylor vertex geometric test alternating test. Data_return numpy matrix size = no_valid_trial x 22 x 1750. Before examining the iv estimators, it is worth noting that 2sls nests the ols estimator, so that a call to iv2sls using none for the endogenous and instruments will produce ols estimates of parameters. Prstd, iv_l, iv_u = wls_prediction_std(res2). The ols estimates indicate that insurance through an employer or union leads to an increase in. This circular aims to establish the policy for the implementation of the benefit package for the. In statistics, the coefficient of determination, denoted r2 or r2 and pronounced r squared, is the proportion of the variance in the dependent variable that is predictable from the independent. Like find any 10 rational numbers between (1/4+3/8)÷2 and (3/8+1/2) ÷2. An illustration of the problem is shown below for the simplest case of 3 corresponding points (the minimum required points to solve). If false, load testing data. Tests in pyret are written in special testing blocks. Finding the optimal/best rotation and translation between two sets of corresponding 3d point data, so that they are aligned/registered, is a common problem i come across. Here we add the answer of the first step to the given sum of the other two numbers.
Belum ada Komentar untuk "Testing' And 2*3*8=6*9 And 'R2Iv'='R2Iv / Testing%' And 2*3*8=6*9 And 'K5Vf'!='K5Vf% / 1548_ch3 ... / Tests in pyret are written in special testing blocks."
Belum ada Komentar untuk "Testing' And 2*3*8=6*9 And 'R2Iv'='R2Iv / Testing%' And 2*3*8=6*9 And 'K5Vf'!='K5Vf% / 1548_ch3 ... / Tests in pyret are written in special testing blocks."
Posting Komentar